Схема подключения видеокамеры - Orange Pi Pinout/Pin definition/Распиновка Orange Pi/GPIO -MicroPi

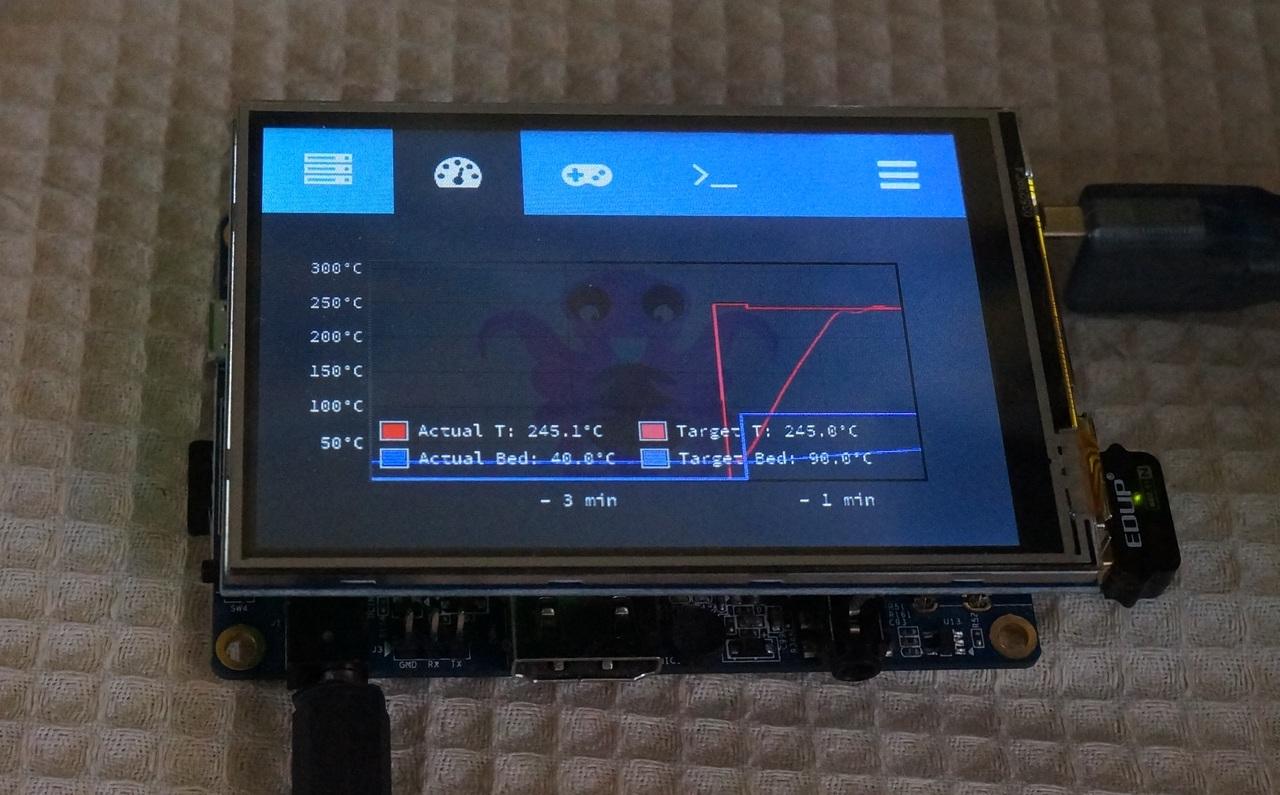
Дисплей + Длиннопост
Из предыдущих статей нашей серии про сервоприводы вы знаете, что для управления сервоприводами используется широтно-импульсная модуляция ШИМ Pulse Width Modulation, PWM. Рассмотрим, почему, если нужно управлять большим количеством сервоприводов, то наилучшим решением будет использование специально предназначенных для этого контроллеров серво-драйверов ServoDriver. Также рассмотрим, какие меры защиты нужно предпринимать при подключении сервоприводов непосредственно к контактам GPIO одноплатных компьютеров, а также научим запускать программы управления сервоприводами от имени непривилегированных пользователей. Если Вам интересна тема управления сервоприводами, то все статьи данного цикла статей Вы можете найти здесь:.














Как выглядит интерфейс GPIO? В самых ранних версиях малинки также можно встретить небольшой разъемчик с 8-ю пинами P2 header - это интерфейс отладки VideoCore JTAG, в последующих версиях он был исключен. В новых версиях платформы разъем GPIO уже содержит 40 пинов 2 ряда по 20 штук. Первые 26 пинов по 13 в ряду - такие же как и в более ранних версиях Raspberry Pi, а остальные 14 штук являются дополнительными:.
- Содержание
- Если эта тема для вас новая, то перед прочтением статьи рекомендую ознакомится с другими статьями для начинающих на тему GPIO - их можно найти в разделе "Документация".
- Для управления использована платформа Raspberry Pi, а программы будем писать на языке Python. Приведу примеры кода для вывода на экран строчки текста, рисунков в формате PNG, а также проведу небольшой практический эксперимент с отображением на экране значения от датчика качества воздуха.
- Из предыдущих статей нашей серии про сервоприводы вы знаете, что для управления сервоприводами используется широтно-импульсная модуляция ШИМ Pulse Width Modulation, PWM. Рассмотрим, почему, если нужно управлять большим количеством сервоприводов, то наилучшим решением будет использование специально предназначенных для этого контроллеров серво-драйверов ServoDriver.







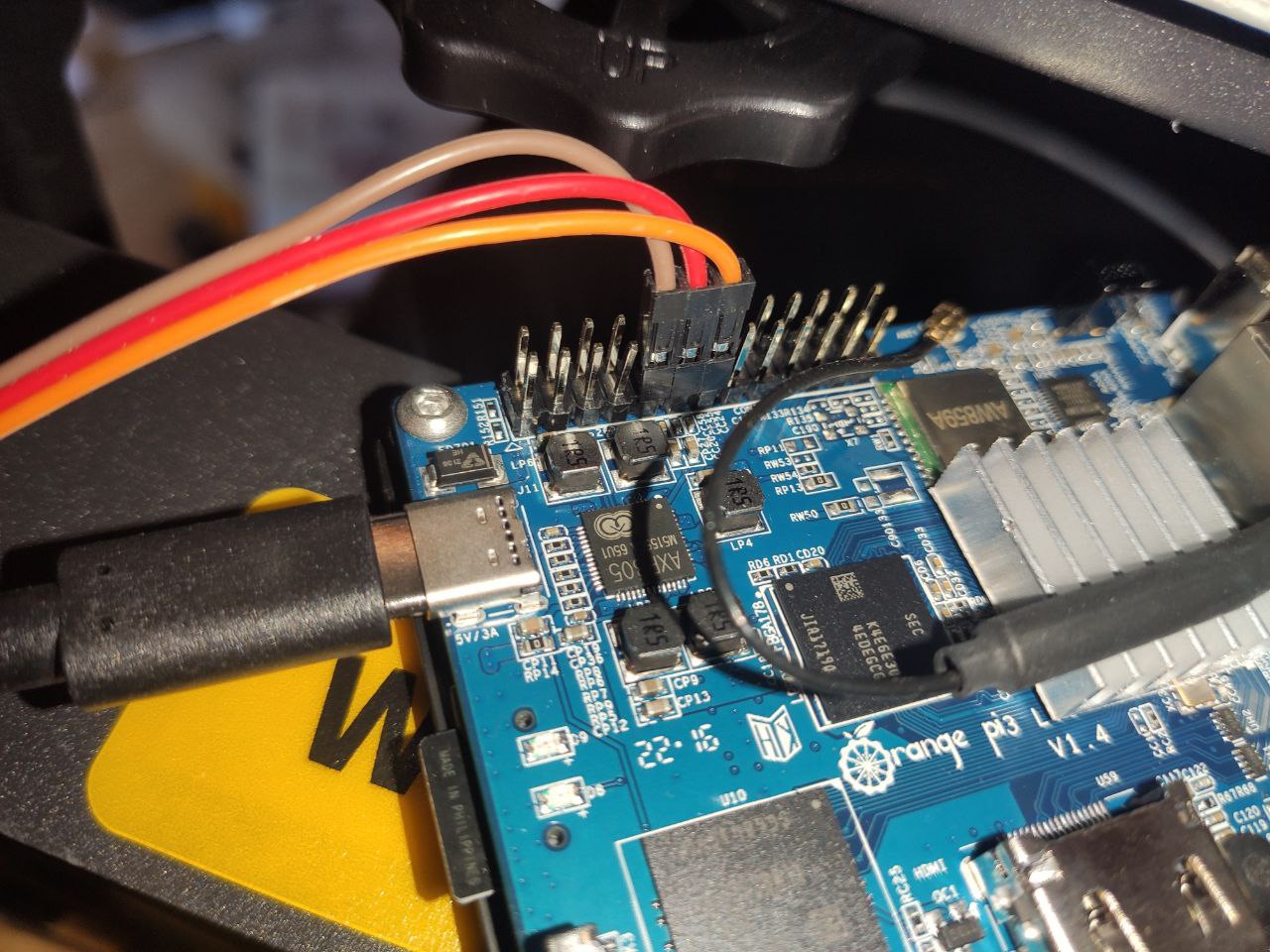
Работа с gpio разъемами в Orange pi
В этой статье мы на подробном примере расскажем о том, как построить настоящего робота целиком на инфракструктуре ROS — Robot Operating System. Это будет наш первый мобильный робот со своей операционной системой и первый опыт работы с ROS. Далее мы постараемся пошагово и как можно подробнее рассказать вам о процессе проектирования, конструирования и программирования робота, а также расскажем, с каким трудностями и проблемами мы столкнулись. Если вы сомневаетесь, что вам это подходит, повторите проект попроще, например робота для езды по линии. Создание свеого робота — это не самая сложная, но и не тривиальная задача.




Похожие статьи
- Регулятор напряжения для вентилятора 220в своими руками - Радиосхемы для начинающих, простые схемы
- Вышивка и украшение бисером - Вышивка бисером на одежде (схемы и фото)
- Плуг своими руками схема - Схемы включения операционных усилителей Мастер Винтик. Всё своими руками!
- Мартина розенберг вышивка схемы - РАДУГА ХОББИ - Радуга Хобби - Chatelaine Design by Martina Rosenbe