Схемы управления биполярным шаговым двигателем

Главное меню
Первый способ обеспечивается попеременной коммутации фаз, при этом они не перекрываются, в один момент времени включена только одна фаза рис 8а. Этот способ называют "one phase on" full step или wave drive mode. Точки равновесия ротора для каждого шага совпадают с точками равновесия ротора у незапитанного двигателя. Это означает, что в таком режиме не может быть получен полный момент. Второй способ - управление фазами с перекрытием: две фазы включены в одно и то же время. Его называют "two-phase-on" full step или просто full step mode.









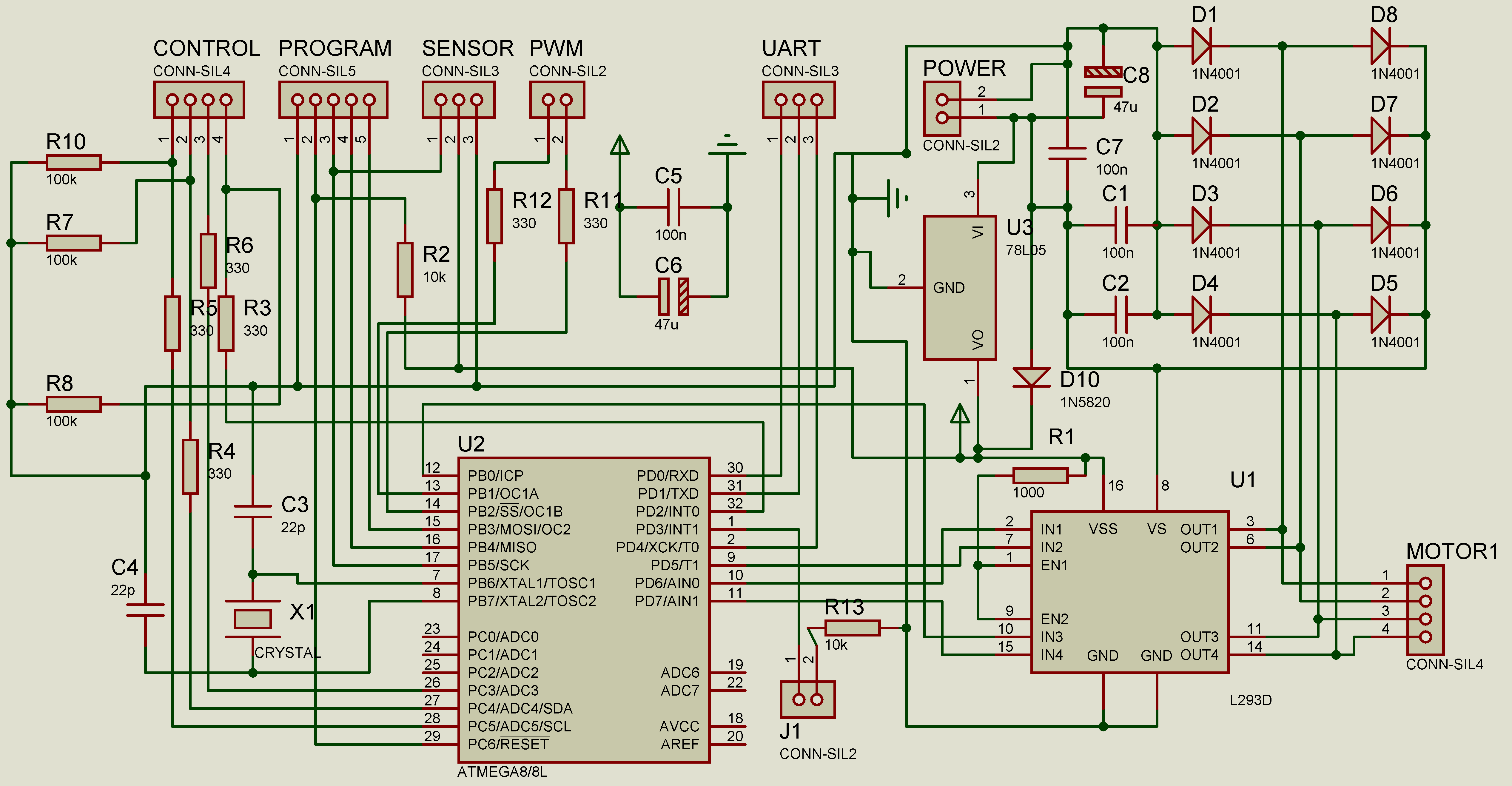
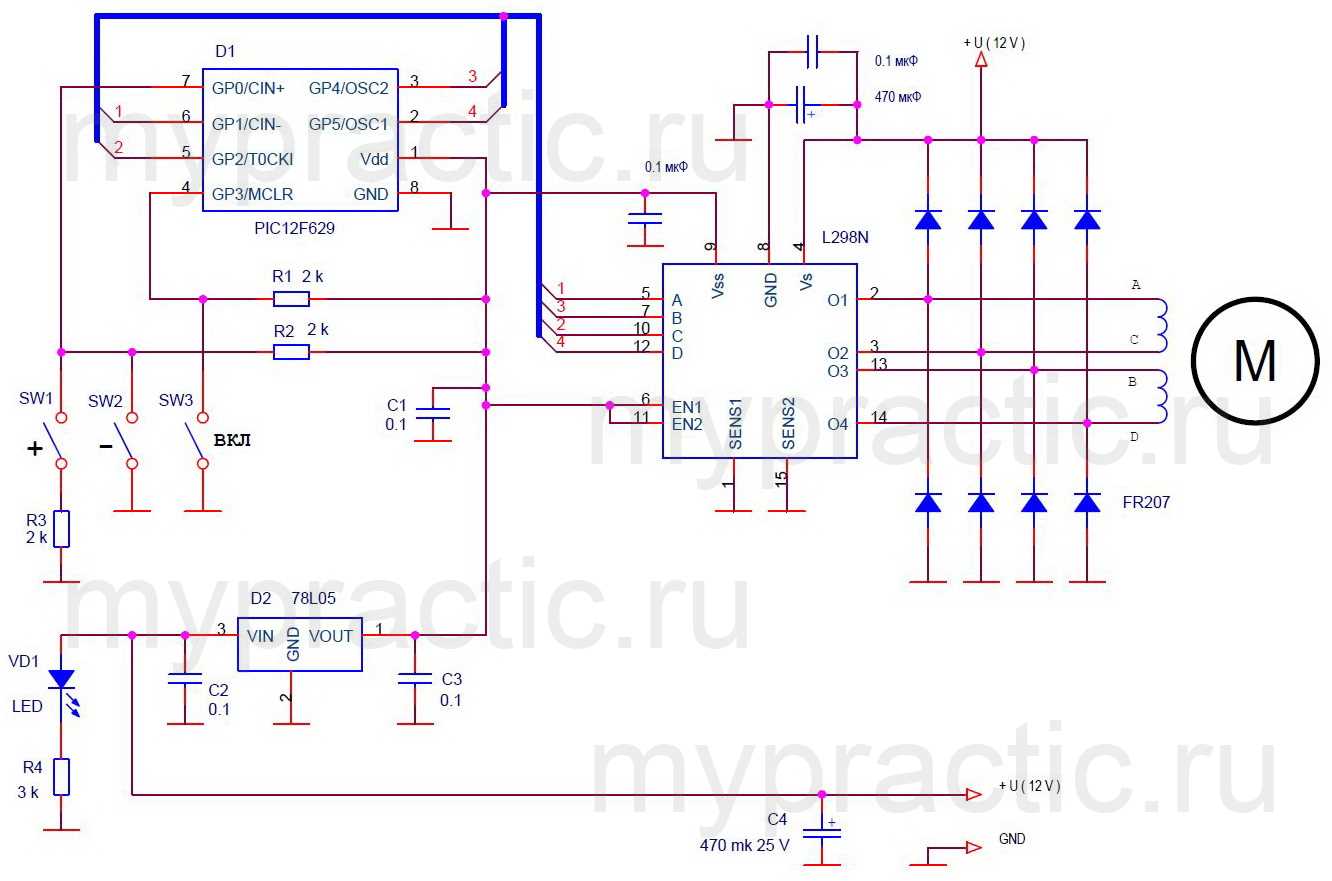
Шаговый двигатель далее ШД - особая разновидность двигателей, который позволяет точно управлять углом поворота ротора. ШД относится к синхронным безщёточным двигателям, имеет несколько обмоток на статоре 2, 4 или 8 , ротор же выполнен из магнито-мягких способных намагничиваться или магнито-твердых материалов постоянных магнитов и их сочетаний. На данный момент распространены биполярные ШД, обладающие двумя обмотками на статоре. Ток в обмотках статора течет то в одну, то в другую сторону попеременно. Поэтому для управления биполярным ШД необходимы два Н-моста, по одному мосту на обмотку. На следующей схеме приведена реализация управления биполярным ШД при помощи двух Н-мостов, каждый из которых построен из 6 транзисторов.


| 114 | Принцип работы шаговых двигателей можно изложить кратко. ШД, как и все типы двигателей, состоят из статора состоящего из катушек обмоток и ротора, на котором установлены постоянные магниты. | |
| 490 | Как правило, логические сигналы для управления шаговым двигателем формирует микроконтроллер. | |
| 184 | Официальный сайт компании Arduino по адресу arduino. | |
| 389 | Как-то раз мне захотелось поэксперементировать с шаговыми двигателями. А вот с биполярным двигателем всё гораздо сложнее. | |
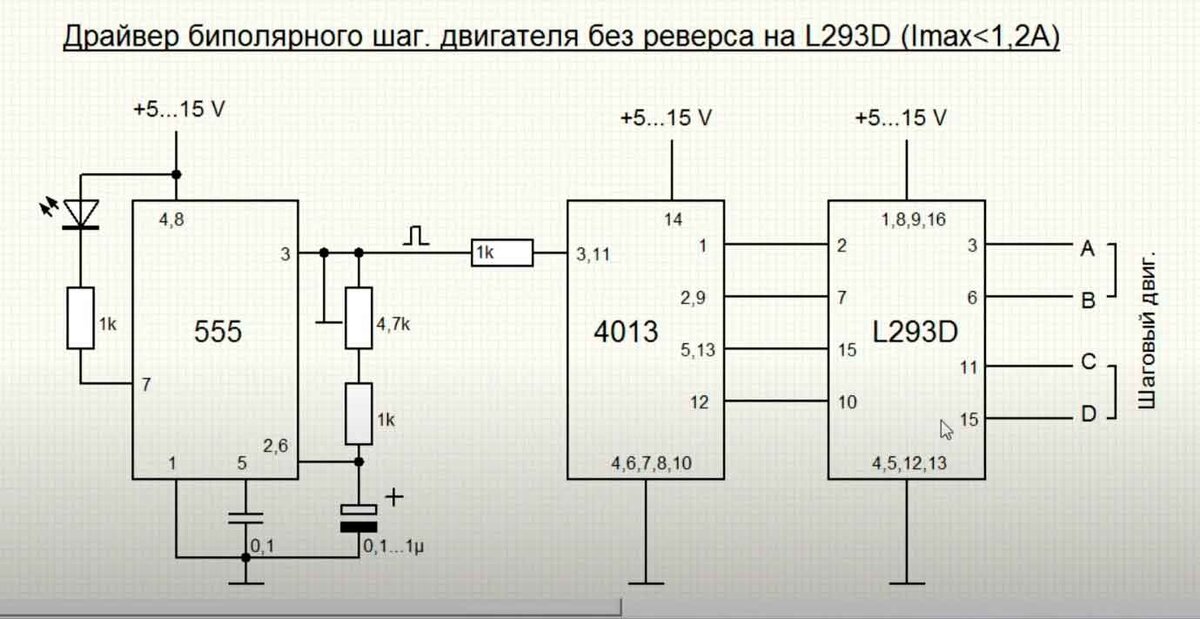
| 108 | Поскольку драйвера для шаговиков LD более популярны у радиолюбителей, чем LB, и их гораздо легче достать, то, по просьбам форумчан, я решил написать продолжение статьи про управление биполярными шаговыми двигателями и рассмотреть схему с драйвером LD. | |
| 327 | Двигатели постоянного тока нашли множество применений, но непрерывное и плавное вращение ротора не всегда требуется. Естественная особенность двигателя BLDC , заключающаяся в том, что для его вращения необходимо постоянно переключать напряжения между обмотками, способствовала развитию шаговых двигателей. |
Биполярный шаговый двигатель отличается от униполярного шагового двигателя тем, что полярность обмоток изменяется во время коммутации. Разом активируется половина обмоток, что обеспечивает в сравнении с униполярными шаговыми двигателями большую эффективность. У биполярных шаговых двигателей четыре провода, которые все соединяются отдельно полумостом.